

Inflatable Brace
3.0 Videos
Inflation/Deflation Explanation

External User Interface
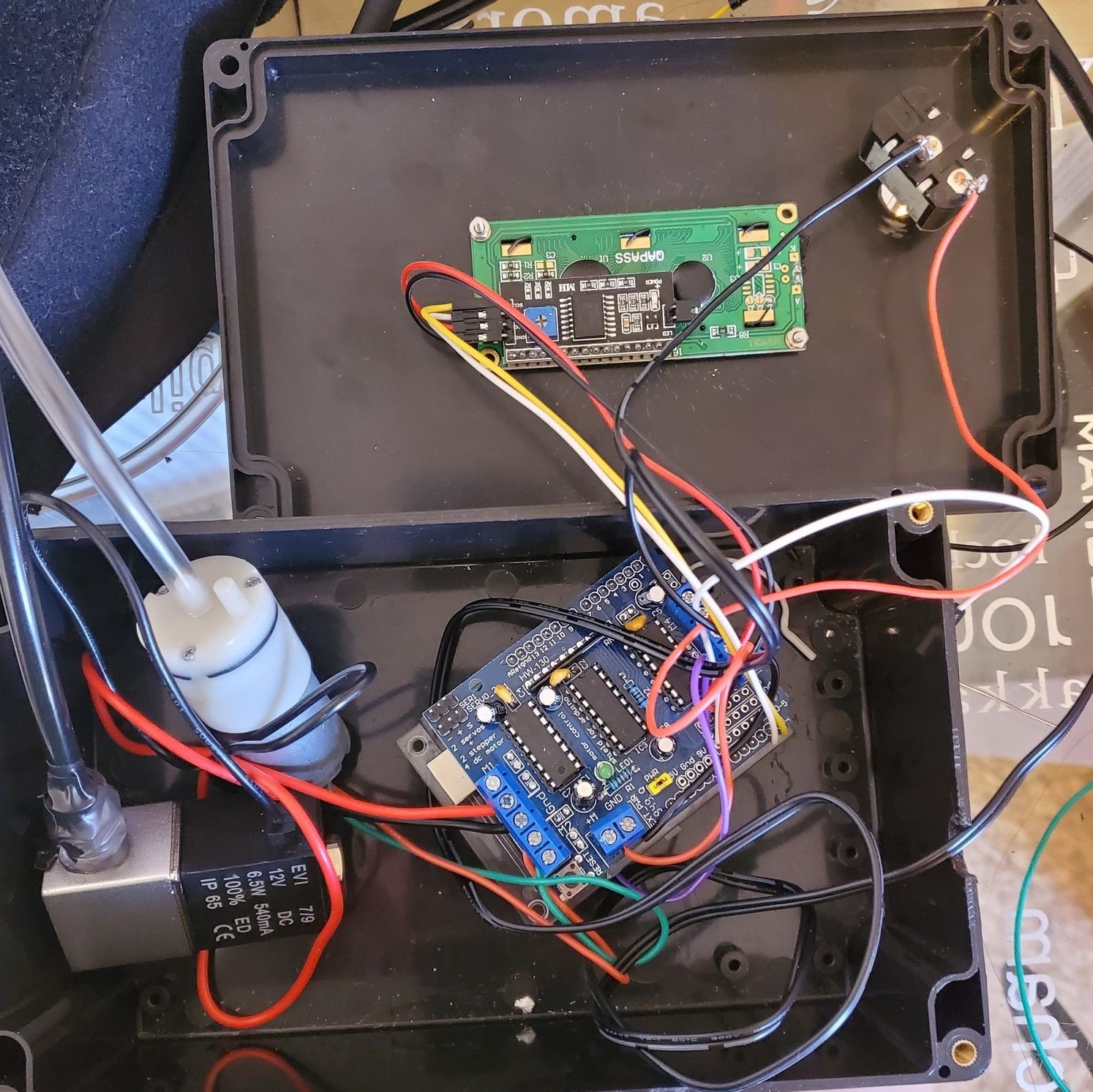
Internal Wiring
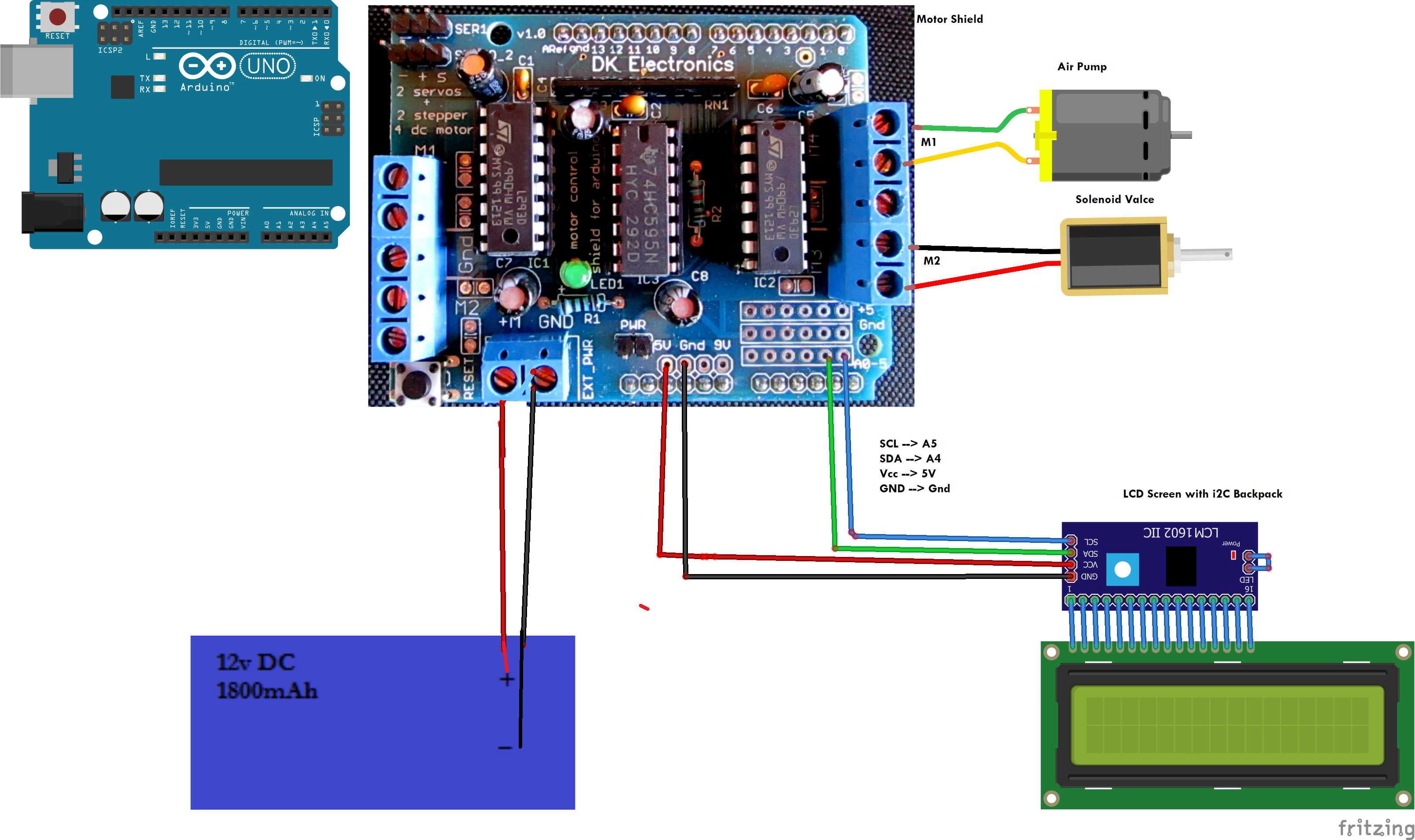
Circuit Diagram
#include //needed to drive motor
#include //needed for circuits
#include //needed w LCD i2C Library
AF_DCMotor pump(2, MOTOR12_64KHZ); // create motor #1, 64KHz pwm for greater inflation power
AF_DCMotor vacuum(1, MOTOR12_8KHZ); // create motor #2, 8KHz pwm
LiquidCrystal_I2C lcd(0x27, 16, 2);
//LCDvariablename(address [use find_lcd_screen_address program to locate], 16x2 characters)
void setup() {
Serial.begin(9600); //begin serial communication (9600 for LCD)
lcd.begin();//Initializing display
lcd.backlight();//To Power ON the back light NOTE: if backlight doesn't turn on,
// ensure power jumper is attached
lcd.setCursor(0,0); //use first row
lcd.print(" WELCOME "); //print mode
pump.setSpeed(255); // Set motor 1 to maximum speed
vacuum.setSpeed(200); // Set solenoid valve to maximum speed
delay(100); //delay
}
//The following loop runs forever
void loop() {
lcd.clear();
vacuum.run(FORWARD); //release the solenoid valve
lcd.setCursor(0,0); //use first row
lcd.print(" INFLATING "); ////print state of device (inflating)
pump.run(FORWARD); // turn on pump
delay(8000); //run for 5000ms
pump.run(RELEASE); //detach the motor to conserve power
lcd.clear(); //clear the screen
lcd.setCursor(0,0); //use first row
lcd.print(" HOLDING "); //print state of device (pausing on inflation)
delay(2000); //delay 5000ms
lcd.clear(); //clear the screen
lcd.setCursor(0,0); //use first row
lcd.print(" DEFLATING "); //print state of device (deflating)
vacuum.run(BACKWARD); //reverse polarity on solenoid valve (since it is normally closed,
//ground will keep it closed)
delay(1000); //allow 1s to release pressure
vacuum.run(FORWARD); //release the solenoid valve
delay(500); //delay .5 second
}