
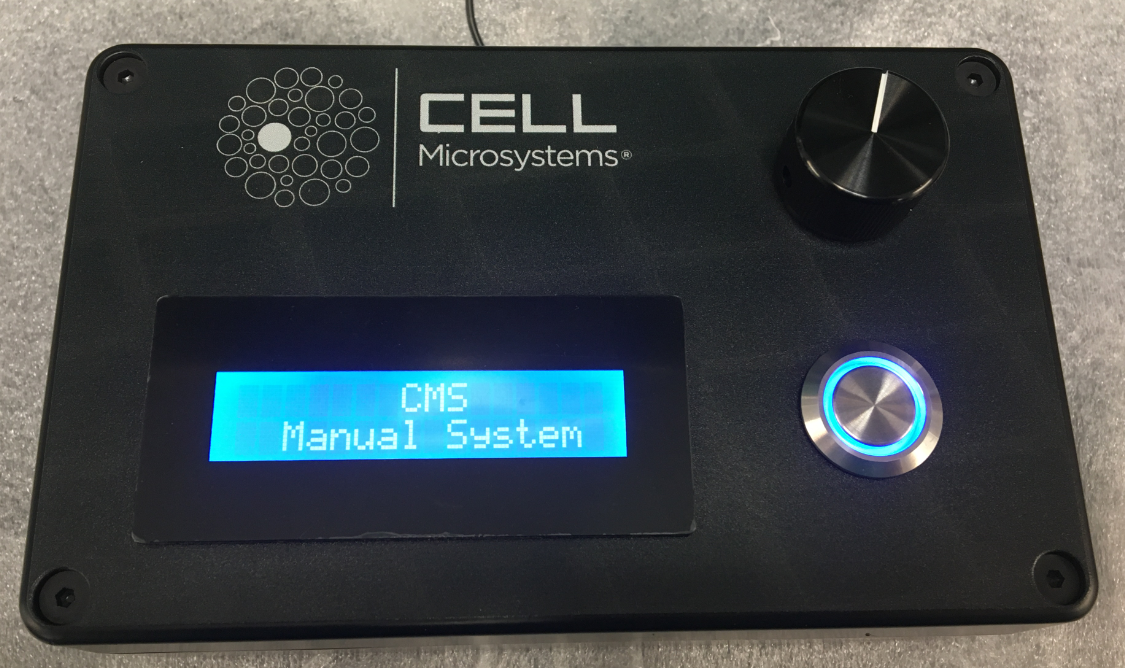
CMS Manual System
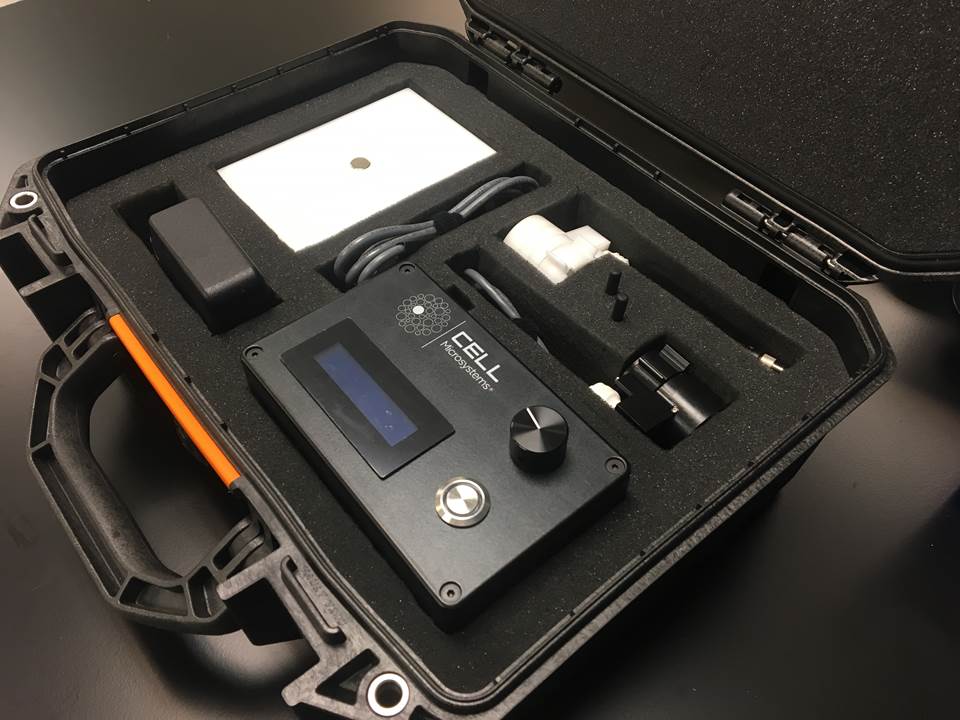
CMS Manual System in Case
3.0 Videos
System Operation
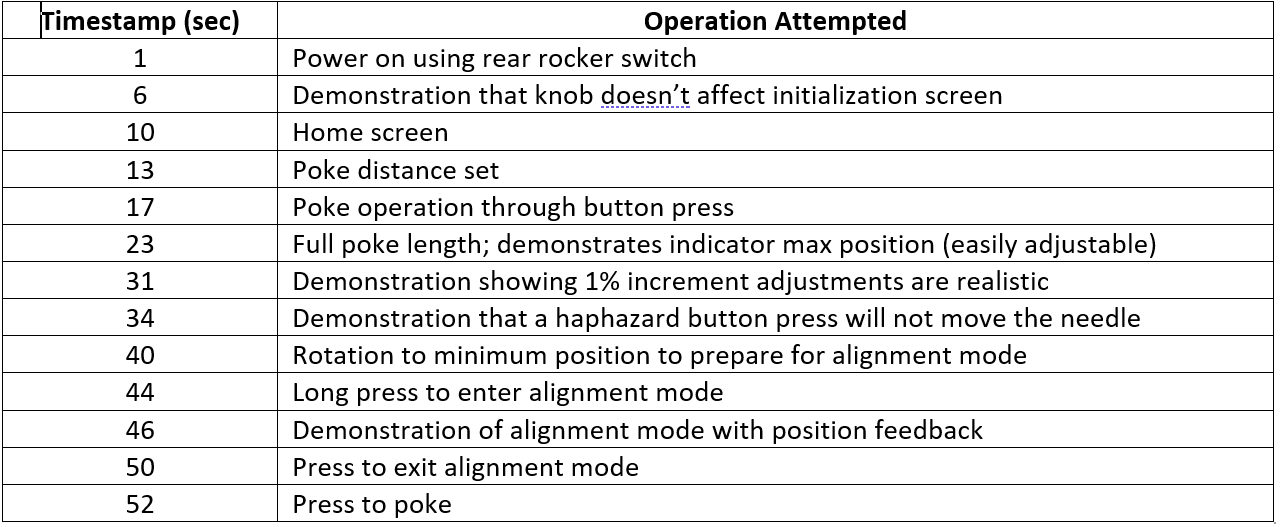
Table Explaining Functionality
#include //needed to drive motor
#include //needed for circuits
#include //needed w LCD i2C Library
AF_Stepper motor(20,1); //20 steps/rev w motor; Motor connected to port 1 (M1/M2)
LiquidCrystal_I2C lcd(0x27, 16, 2);
//LCDvariablename(address [use find_lcd_screen_address program to locate], 16x2 characters)
int sensorPin = A1; //select the input pin for the potentiometer
int button = A2; //select the pin for the button
int sensorValue = 0; //Initialize variable to store the value coming from the sensor
int homePos = 700; //number of steps down to home position; overshot to ensure fully 0
int state; //Initialize variable to store value from button
int motorMove = 0; //state of travel mode
int travelSteps = 0; //number of steps set by pot
int travelDist = 0; //number of steps to travel
int travelPercent = 0; //percent to display on LCD screen (1-100%)
int align = 0; //Initialize variable to check if in alignment mode
int delta = 0; //Initialize variable for movement in alignment mode
int welcome = 1; //Initialize variable for welcome screen state
int reading; // the current reading from the input pin
int check = 0;
void welcomeScreen() {
motor.step(homePos, BACKWARD, SINGLE); //travel motor to 0 position
while (welcome == 1){ //repeat while welcome = 1 is true
lcd.setCursor(0,0); //use first row
lcd.print(" CMS "); //welcome screen
lcd.setCursor(0,1); //use second row
lcd.print(" Manual System "); //welcome screen
reading = digitalRead(button); //read state of button (high or low)
if ((reading) == HIGH) { //While the button is pressed
while ((analogRead(sensorPin) < 5) == 1) { //loop while the potentiometer is set below 5 (for safety)
delay(100); //debounce button
reading = digitalRead(button); //check button state to ensure it has been released.
//This allows for the user to press it for any period of time
if (reading == LOW){ //if the button is not pressed any longer
welcome = 0; //set welcome screen to 0 so it never shows up again
align = 1; //allow alignment mode
delay(100); //debounce the button (ms)
Alignment(); //enter alignment mode (always entered upon first boot up for safety)
}
}
delay(100); //debounce the button
}
}
}
void CheckHold() { //check if button has been pressed
motor.release(); //release motor when not in alignment or travel
delay(100); //debounce the button
reading = digitalRead(button); //check state of button (HIGH or LOW)
if (reading == HIGH) { //if the button is pressed
check = 1; //if button has been pressed, loop until it is not pressed anymore
while (check == 1) {
if ((analogRead(sensorPin) < 5) == 1) { //If the potentiometer is set below 5..
delay(100);
reading = digitalRead(button); //recheck button
if (reading == LOW){ //if it has been released
motorMove = 0; //disable travel mode
align = 1; //allow alignment mode
check = 0; //exit check loop
delay(100); //debounce button
Alignment(); //enter alignment mode.
}
}
else { //if pot is greater than 5
delay(100); //debounce
reading = digitalRead(button); //read button
if (reading == LOW){ //if button is released
motorMove = 1; //enable travel mode
align = 0; //disable alignment mode
check = 0; //exit check loop
delay(100); //debounce
NeedleRelease(); //enter travel mode
}
}
delay(100); //debounce the button
}
}
}
void NeedleRelease() {
align = 0; //disable alignment mode
lcd.clear(); //clear screen
lcd.setCursor(0,0); //use first row
lcd.print(" Traveling "); //centered "traveling" state
lcd.setCursor(0,1); //use second row
lcd.print(" "); //centering text
lcd.print(travelPercent); //print travel distance (1-100%)
lcd.print("% "); //print travel distance (1-100%)
motor.step(travelSteps, FORWARD, SINGLE); //run motor to the number of steps set by pot
delay(100); //pause 100ms
motor.step(homePos, BACKWARD, SINGLE); //run motor to home (overshot)
delay(500) ; //Must wait 500 ms before next release
lcd.clear(); //clear screen
motor.release(); //Make the motor "float" so that it does not consume power
motorMove = 0; //disable release mode
loop(); //return to home loop
}
void Alignment() {
welcome = 0; //disable welcome screen from now on
delay(100); //delay
lcd.clear(); //clear LCD screen
lcd.setCursor(0,0); //use first row
lcd.print(" Alignment Mode"); //print which mode
sensorValue = analogRead(sensorPin);
//Read the value from the potentiometer - Range can be from 0 - 1023
MOVE = round(sensorValue*0.5);
//Multiply value by 0.5 to make max number of steps 512 (10.24 mm)
motor.step(MOVE, FORWARD, SINGLE);
//Move motor to position set by potentiometer
delay(100); //delay
while (align == 1) {
//While in alignment mode execute the following code:
sensorValue = analogRead(sensorPin); //0-1023
travelPercent = round(sensorValue*.098); //convert potentiometer value to percent
lcd.setCursor(0,1); //use second row
lcd.print(" Distance: "); //print travel distance (1-100%)
lcd.print(travelPercent); //print travel distance (1-100%)
lcd.print("% "); //print travel distance (1-100%)
travelSteps = round(sensorValue*.5); //capping max steps at = 1023/2 = ~512 steps
travelDist = travelSteps - delta; //num steps to travel (checks for change from prvious pot value)
if (travelDist > 4) { //if change is positive & > 4
motor.step(travelDist, FORWARD, SINGLE); //travel difference in steps
delta = travelSteps; //keep track of previous value
}
else if (travelDist < -4) { //if change is negative & > 4
motor.step(abs(travelDist), BACKWARD, SINGLE); //travel difference in steps
delta = travelSteps; //keep track of previous value
}
motor.release(); //Float the motor to save power
delay(10); //small delay
reading = digitalRead(button); //check button state
if (reading == HIGH) { //if the button is pressed
check = 1; //loop until button is low
while (check == 1) { //loop until button is low
delay(100);
reading = digitalRead(button);
if (reading == LOW){ //if button is released
lcd.clear();
lcd.setCursor(0,0); //use second row
lcd.print(" Exiting "); //print mode
lcd.setCursor(0,1); //use second row
lcd.print(" Alignment Mode"); //print mode
motor.step(travelSteps, BACKWARD, SINGLE); //Return the motor to its initial position
lcd.clear(); //clear screen
delay(100); //delay for noise reduction
align = 0; //disable alignment
check = 0; //disable check loop
delay(100); //delay
loop(); //return to home loop
}
delay(100); //debounce the button
}
}
}
}
void setup() {
Serial.begin(9600); //begin serial communication (9600 for LCD)
lcd.begin();//Initializing display
lcd.backlight();//To Power ON the back light NOTE: if backlight doesn't turn on, ensure power jumper is attached
lcd.clear(); //clear screen
motor.setSpeed(1500); //Sets speed in steps per second
pinMode(button, INPUT); //Set the button pin to be an digial input
delay(100); //delay
welcomeScreen(); //upon start up, open welcome screen
}
//The following loop runs forever
void loop() {
welcome = 0; //disable welcome screen
lcd.setCursor(0,0); //use first row
lcd.print("Press button to"); //print travel distance (1-100%)
lcd.setCursor(0,1); //use second row
lcd.print("Align or Release"); //print travel distance (1-100%)
reading = digitalRead(button); //Check the state of the button
if (reading == HIGH){ //if the button is pressed..
CheckHold(); //Run CheckHold() function
}
}